

北京立萨科技有限公司
咨询热线:010-82488292
公司电话:010-82488292
公司传真:010-82611646
企业邮箱:sales@lisatech.cn
地址:北京市海淀区中关村大街19号 新中关大厦B座南翼15层1507室
工业级教学应用六轴机械手臂
摘要 : 工业级教学应用六轴机械手臂,以太网通讯基于标准的以太网通讯,微型机器人提供了一个可扩展的分布式控制系统。它也是以太网相关培训的一个很好的工具。
MINIBOT小宝机器人

产品介绍
以太网通讯
· 基于标准的以太网通讯,微型机器人提供了一个可扩展的分布式控制系统,
它也是以太网相关培训的一个很好的工具。
工业机器人设计
· 参照一般工业的6轴铰接式机器人设计,微型机器人的建造方式与此相同。它的裸机机械结构易于对工业机器人的结构的学习
开放的开发环境
· 微型机器人附带一个实用工具,可以直接操作机器人。Windows平台还提供机器人控制API,用户可以利用其开放性来开发任意类型的机器人应用程序。
主要特点
- 基于以太网
- 设计紧凑
- 适用于教育行业
- 标准6轴铰接式机器人
- 控制柜
- 机器人控制API
- 关节型6轴机器人
- 开放式机器人控制器
产品规格
机器手臂
自由度: 6
Payload: 1kg
驱动系统: 以太网闭环步进器
位置反馈: 增量编码器
操作范围: 590mm (maximum)
- J1: ±175°
- J2: +110°~ -92°
- J3: +63°~ -153°
- J4: ±175°
- J5: ±92°
- J6: ±180°
再现性: ±0.12mm
重量: arm 30kg
输入电压: 单相 100~240Vac
控制器
DI/O: 15-ch DI/16-ch DO (DB37 接头)
1 x Intel® GbE LAN port 1 x VGA
2 x USB 2.0 (外置)
1 x USB 3.0, 1 x USB 2.0 (控制柜内)
1 x 紧急制动端
重量: 控制柜 20kg
软件
NexGRC 运行时(机器人控制运行时)
NexMotion studio (配置程序)标准的机器人动作控制功能
支持CC++, C# 和 VB.Net用户编程
OS: WES7
MiniBOT应用客户

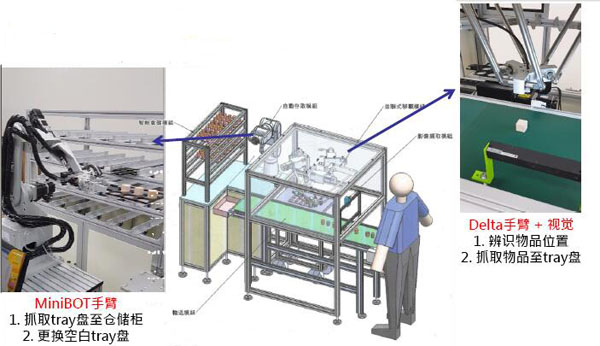
MiniBOT应用实例
台湾 中科机器人自造基地
- 机器人培训 机器人原理、操作、视觉应用 - 机器人竞赛(搭配Nvidia AI)

台湾 南开科技大学
- 智慧产线示范线
上一篇:配电系统中的应用解决方案1970-01-01
下一篇:工业自动化和计算机解决方案1970-01-01
文章推荐
- RK3288底板+核心板设计过程
- RK3288广告机硬件和软件调试心得
- 一款基于TI Sitara Cortex-A8 AM3358的嵌入式单板机
- BeagleBone产品采用了德州仪器推出的Sitara AM335x Cortex A8 ARM处理器
- 一个带有HDMI视频输入的VS-RK3288方案
- 瑞芯微vs-rk3288方案定制Android 开发板
- RK3288在人脸识别上的应用及外接双路摄像头
- 德州仪器(TI)工业以太网解决方案
- AM335x ARM Cortex-A8处理器-TI DLP 3D打印机总体解决方案
- 瑞星微RK3288方案设计
- i.MX6Q Cortex-A9新一代智能平台
- i.MX6Q车载全触控智能管理终端解决方案
- AM3354嵌入式充电桩计费控制单元主板方案
- 大联大控股世平推出 TI 、NXP 多领域应用人机交互平台
- 强化物联网“心脏”,智能网关设计详解
- TI AM437x系列处理器为核心的嵌入式开发板Rico Board
- 如何用BB Black制作DAC系统
- 采用AM3352工控核心板进行免疫荧光检测仪解决方案
- 人机交互与TI Sitara处理器的产品性能介绍
- Rockchip RK3399 eMMc 的 DTS 配置说明
| 我要评论: | |
| *内 容: |
|
| 验证码: |
|


共有0条评论